


- 更新时间:2024-04-28 16:25
所属行业:电气 工控电器 DCS/PLC系统 -
发货地址:上海松江永丰
信息编号:265276036,公司编号:22556605
产品规格:模块式
产品数量:1000.00 台
包装说明:全新
产品单价:面议
官方网址:http://zhangqueena.b2b168.com/
- 15221406036 聂航
- 留言数:1人
- 查看数:60人
西门子6ES7231-7PD22-0XA8详细说明
- 相关产品:
西门子代理商
西门子一级代理商
浔之漫智控技术(上海)有限公司
会员 5 年
- 所在区域:上海松江永丰
- 经营性质:私有企业
- 企业类型:经销批发
- 注册地:上海 松江 永丰 上海市松江区广富林路4855弄52号3楼
- 主营产品:西门子DP电缆代理商,西门子中国代理商,西门子中国一级代理商,西门子模块代理商,西门子,代理商
- 企业已认证
- 个人实名已认证
- 产品分类
- 商家其他产品
- “西门子6ES7231-7PD22-0XA8详细说明”详细信息
品牌:西门值+ 包装说明 全新 - 产品规格子:现场安装
西门子6ES7231-7PD22-0XA8详细说明
随着我国工业技术的迅猛发展,龙门吊车在工业制造中的应用越来越广泛。采用PLC控制的龙门吊能够使生产过程中的可控性和安全性大大提高。本文设计的转向系统是由PLC按照设定的程序对采集到的信号进行集中控制与处理,同时实现了操作管理、设备管理和安全管理的**统一,优化了控制方法,提高了工作效率。
1 PLC及控制系统的工作原理
1.1 PLC工作原理
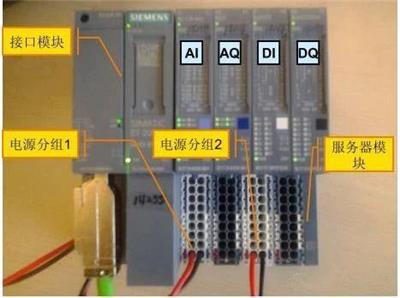
PLC是可编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算和算术运算等操作指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。它实质上是一种工业控制计算机,只不过与计算机相比,具有更强的与工业过程相连接的接口,从硬件结构看,如图1所示。
PLC的工作方式是一个不断循环的顺序扫描方式,其工作过程分为输人处理、内部处理、通信操作、程序执行和输出处理。
1.2 控制系统的工作原理
龙门吊主要用来吊装各种货物。某些工矿在吊装过程中龙门吊通过限界过小,它与两侧的货架距离只有100mm,为了保证龙门吊能够货架,使龙门吊行进方向保持一致,设计研发了PLC控制的自动转向系统,其控制系统工作原理如图2所示。
图中龙门吊车底部的转向轮转轴处均安装一个角度传感器,它采用智能磁敏感元件,将机械转动或角位移转化为电信号输出。角度传感器具有分辨率高,温度稳定性好的优点,可适用于水、油、汽、粉尘等恶劣环境,它提供多种输出形式,如模拟量、PWM脉宽调制波等,还可配接显示仪表,角度显示仪表具有选带报警、角度设定、计算机通讯接口和打印接口功能。根据龙门吊通过限界计算较大转向角度,从而当测量轮子转动角度超过50时,传感器产生电压信号并通过AD模块输入PLC控制器。再由过于狭窄发出程序指令,通过变频器控制螺旋升降机,推动转向轮转向。位移传感器是用来反馈螺旋升降机的当前位置,PLC可通过反馈回来的值控制螺旋升降机运动到*的位置,使轮子转动一定的角度。由于龙门吊车左右各有一对转向轮,所以当一边转向轮开始转向时,为使吊车平稳行驶,需要控制两边转向轮同步转动。
如果系统处于自动转向状态,可通过角度传感器到轮子的转角数据进行自动转向操作。当龙门吊遇到弯道时,根据已经测量得转弯半径的转角值(50),通过PLC控制器进行转向。龙门吊四组转向轮有四个角度传感器,当龙门吊向左转向时,角度传感器测得左转角度值,并产生电信号,输入PLC控制器中。再由PLC发出指令,控制螺旋升降机运动,使转向轮向左侧转向。当转向角度值为小于50系统主要检测来自右侧的角度传感器信号,每次使两侧轮子转动一个适当的角度,以免转角过大,撞到防撞墙。左侧角度传感器的检测值也需要获取,但只要距离没有低于警戒俏,即可不做出反应。超过转向角度值50时,进行回转调整。
2 控制系统的设计与实现
2.1 控制系统的分析
该系统采用PLC程序控制,程序的关键是要理清系统工作过程中实际需要的控制关系,以及控制器中的信号处理及程序指令。其系统功能模块分为信号控制、PLC控制、角度控制和转向控制。信号控制模块产生转向1Cl号,输人PLC控制器;PLC控制模块是系统的核心,控制着整个系统的工作过程,包括信号输入、信号处理、程序执行和输出指令位置控制主要反馈螺旋升降机的位置和角度;转动控制控制着转向轮转向;如图3所示。
2.2 控制系统的设计流程及实现
在基于PLC控制的系统中,首先控制信号模块中发出转向信号,输入PLC控制器,并山已编好的程序进行处理,再根据位置控制中的反馈信号发出程序指令控制螺旋升降机推动底轮转向。其控制系统设计流程如图4所示.
图中信号控制模块中主要由角度传感器测得转角值,当大于某个值时,由此产生电信号,可作为转向信号,输入PLC控制器。PLC是控制系统的核心,电任输入到PLC中利用AD模块进行数据处理,并根据程序执行指令。位置控制中存储螺旋升降机的角度值及当前所在的位置,并反馈到PLC控制器中,PLC根据转向信号和反馈的位置发出控制指令,通过变频器控制螺旋升降机,从而达到自动转向的效果。
3 结论
控制的龙门吊自动转向系统,该系统运行稳定,自动化性能强,能够快速灵活的控制龙门吊车底部转轮的转动方向与角度,从而大大提高了龙门吊的工作效率。龙门吊行走偏差在可控范围之内,操作方便,性高,更避免了经济的损失。


一、设备:FX1NPLC、FX1N-4858BD、三菱D700变频器
二、工具:网线、PLC下载线、小螺丝、电脑
三、设置变频器参数:
PLC和变频器之间进行通讯,通讯规格必须在变频器的初始化中设定,如果没有进行初始设定或有一个错误的设定,数据将不能进行传输。
PLC和变频器之间进行通讯,通讯规格必须在变频器的初始化中设定,如果没有进行初始设定或有一个错误的设定,数据将不能进行传输。
参数号 | 名称 | 设定值 | 说明 |
Pr.117 | 站号 | 0 | 设定变频器站号为0 |
Pr.118 | 通讯速率 | 96 | 设定波特率为9600bps |
Pr.119 | 停止位长/数据位长 | 11 | 设定停止位2位,数据位7位 |
Pr.120 | 奇偶校验有/无 | 2 | 设定为偶校验 |
Pr.121 | 通讯再试次数 | 9999 | 即使发生通讯错误,变频器也不停止 |
Pr.122 | 通讯校验时间间隔 | 9999 | 通讯校验终止 |
Pr.123 | 等待时间设定 | 9999 | 用通讯数据设定 |
Pr.124 | CR,LF有/无选择 | 0 | 选择无CR,LF |
Pr.340 | 通讯启动模式选择 | 1 | 网络运行模式 |
注:设置以上参数前先将Pr.160设置成0。如果要使用外部端子来控制变频器的启停,要将Pr.340设置成1,Pr.79设置成2,Pr.338设置成1。
四、连接变频器与PLC
- “西门子6ES7231-7PD22-0XA8详细说明”联系方式
- 我要给“西门子6ES7231-7PD22-0XA8详细说明”留言
- “西门子6ES7231-7PD22-0XA8详细说明”商家推荐产品











- 西门子6ES7231-7PD22-0XA8详细说明相关产品
-
吴中区纺织助剂海运办理
天津市南开区注册公司代理记账
22810-00-13-10-02 模块 Bently Nevada本特利 易于使用 全新原装
国电南瑞NSR641RF-D备用电源自投装置
做节能评估报告要点分析-潢川节能评估报告公司
二手餐厨油离心机 1200型平板密闭不锈钢离心机 固液分离
注销中国香港公司全流程讲解
6ES7 231-7PB22-0XA8全新
天津北辰区注册教育培训学校申请
PVDF微粉 高纯度高白度
磁性氧化铁棕 吸附非金属填料 25公斤/袋
东丽区工商注册申请流程
西安到乌兰浩特物流专线 全境无盲点
Anritsu MS9710C/安立MS9710C光谱分析仪
食品接触级PP 巴塞尔 EP540P EP540N 高刚性 耐冲击
中国香港公司审计哪种报告才是正确的如何正确出具
100吨地埋式污水处理设备价格
转让江苏南通典当行,转让法人股典当行
中国污水处理行业前景预测及投资方向建议报告2023-2029年
西安到阿巴嘎旗物流专线 全境无盲点
北京24小时在线咨询离婚律师